










Individuelle Einzelmaschinen
RHF-A25/25
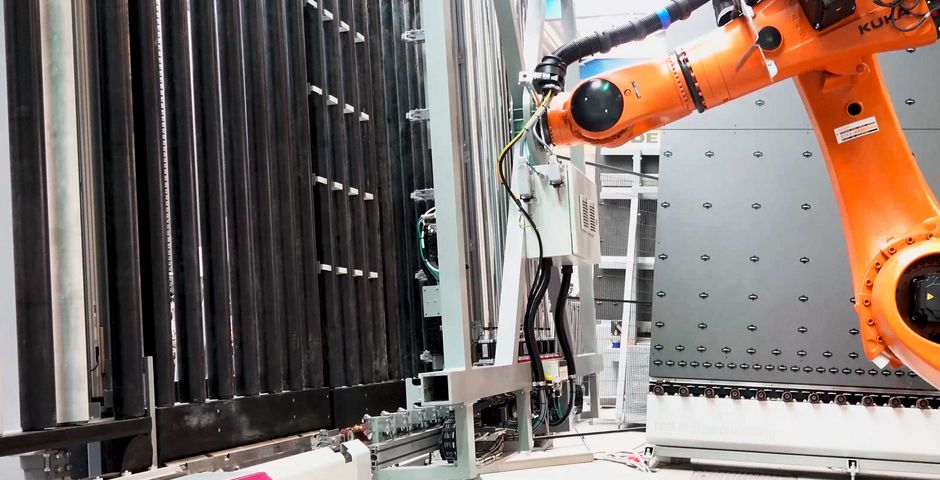
Robotersystem zum automatischen Rahmensetzen
Ein System aus fixen und dynamisch verfahrbaren Greifern sorgt für eine optimale Ausrichtung und einen sicheren Transport von Rahmen mit beidseitig aufgetragenem Butyl. Der Roboterarm setzt den stabil geklemmten Rahmen mit hoher Positioniergenauigkeit präzise an das Glas an.
Wie ist der RHF-A25/25 aufgebaut?
Der RHF-A25/25 besteht grundsätzlich aus einem sechsachsigen Knickarmroboter und dem darauf montierten Rahmengreifer-System. Die Rahmen werden vorzugsweise von einem automatischen Butylextruder abgeholt und an das Glas angesetzt, das auf der Isolierglaslinie an der benötigten Stelle ausgerichtet wird.
Wie funktioniert das Robotersystem zum automatischen Rahmensetzen?
Der Roboter bewegt ein stabiles Greifer-Gerüst, dass den Rahmen an allen Seiten fest im Griff hat und ein Ansetzen auf höchstem Qualitätsniveau durchführt.
Für wen ist der RHF-A25/25 geeignet?
Das System ist für alle gängigen starren Abstandhaltertypen geeignet, selbst Sprossen können verarbeitet werden. Der RHF-A25/25 ist ideal für Kunden, die auf der Suche nach einem vollautomatischen, prozessstabilen Rahmenmontagesystem sind. Durch den kontinuierlichen Arbeitsvorgang kann die Produktionsleistung wesentlich gesteigert werden.
Welche Vorteile bietet dieses Robotersystem?
Da der Rahmen vom Abheben nach dem Butylieren bis zum Ansetzen am Glas immer allseitig geklemmt ist, ergibt sich für alle Rahmengrößen ein prozessstabiler Fertigungsablauf. Zusätzliche Vorteile sind die erweiterten räumlichen Möglichkeiten, die sich durch den großen Bewegungsspielraum des Roboters ergeben. So kann die Rahmenfertigung praktisch in nahezu jedem beliebigen Winkel zur Isolinie platziert werden.
- Schnelles und prozessstabiles Rahmensetzen
- Gleichmäßige Rahmeneinstände an allen Seiten
- Verarbeitung eines großen Bereichs von Rahmengrößen
Die Highlights
Schnelles und prozessstabiles Rahmensetzen
Das ausgeklügelte Greifersystem in Kombination mit dem präzisen Roboter ergibt ein schnelles, prozessstabiles Rahmenmontagesystem mit höchster Genauigkeit.
Gleichmäßige Rahmeneinstände an allen Seiten
Durch die dynamisch verfahrbaren Greifer werden auch verformte oder durch ihr Eigengewicht durchhängende Rahmen immer in optimale Form gebracht und ausgerichtet.

Verarbeitung eines großen Bereichs von Rahmengrößen
Das flexible Greifer-Gerüst passt sich innerhalb kürzester Zeit auf einen großen Bereich von Rahmenformaten an. Durch die variable Positionierung der dynamischen Greifer können diese optimal auf der jeweiligen Länge verteilt werden, um einen sicheren Halt zu gewährleisten.

")